






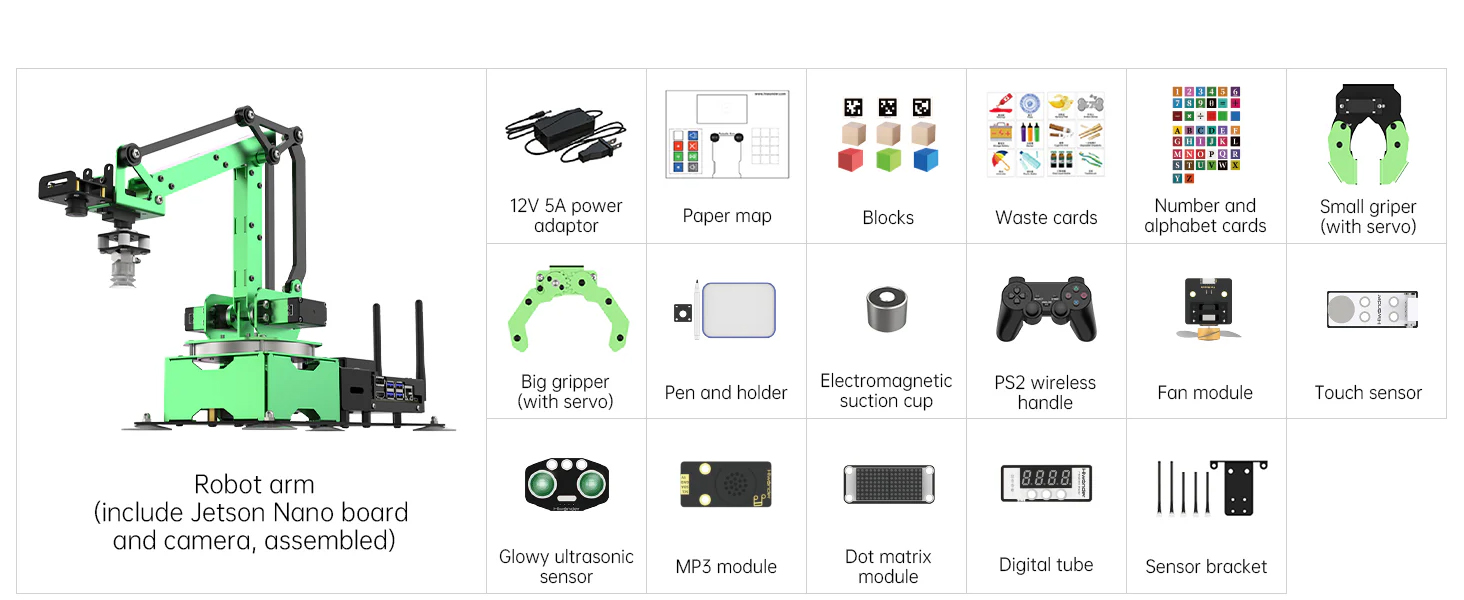
JetMax Robotic Arm for Jetson Nano AI Vision ROS Open Source Programmable Robot Arm Kit with 4 Kinds Gripper Camera Sensor Modules Wireless Controller, App/PC Coding Study DIY
(0
reviews)
Estimate Shipping Time:
3 Days
Sold by:
The scenery of wind
The scenery of wind
Price:
$879.99
/pc
Refund:
Share:
Top Selling Products










Anodized Bracket
JetMax's body is constructed with anodized metal brackets. The controller is equipped with a sturdy metal shell that offers excellent protection.
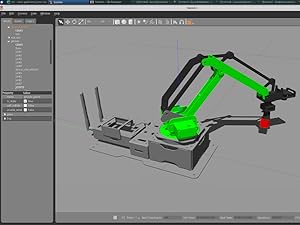
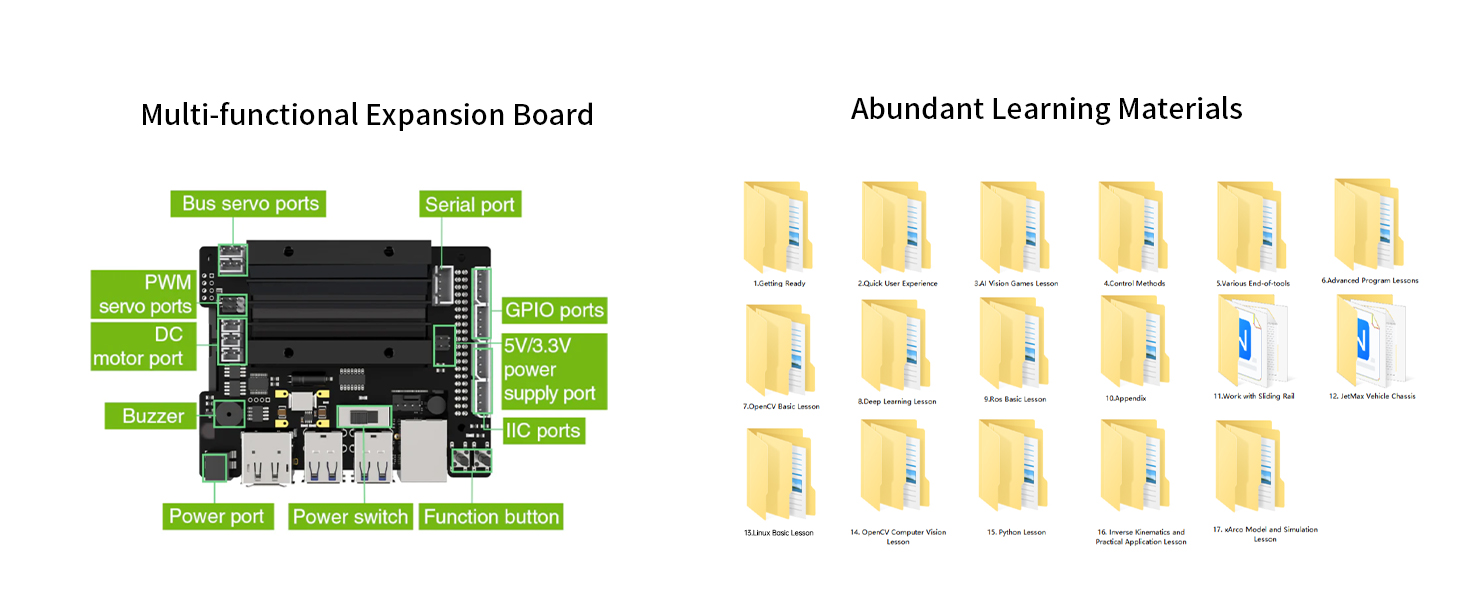
Provide URDF Model
JetMax is built on ROS, supports Gazebo simulation and offers a URDF model. This reduces demands on experimental environment and improves efficiency.
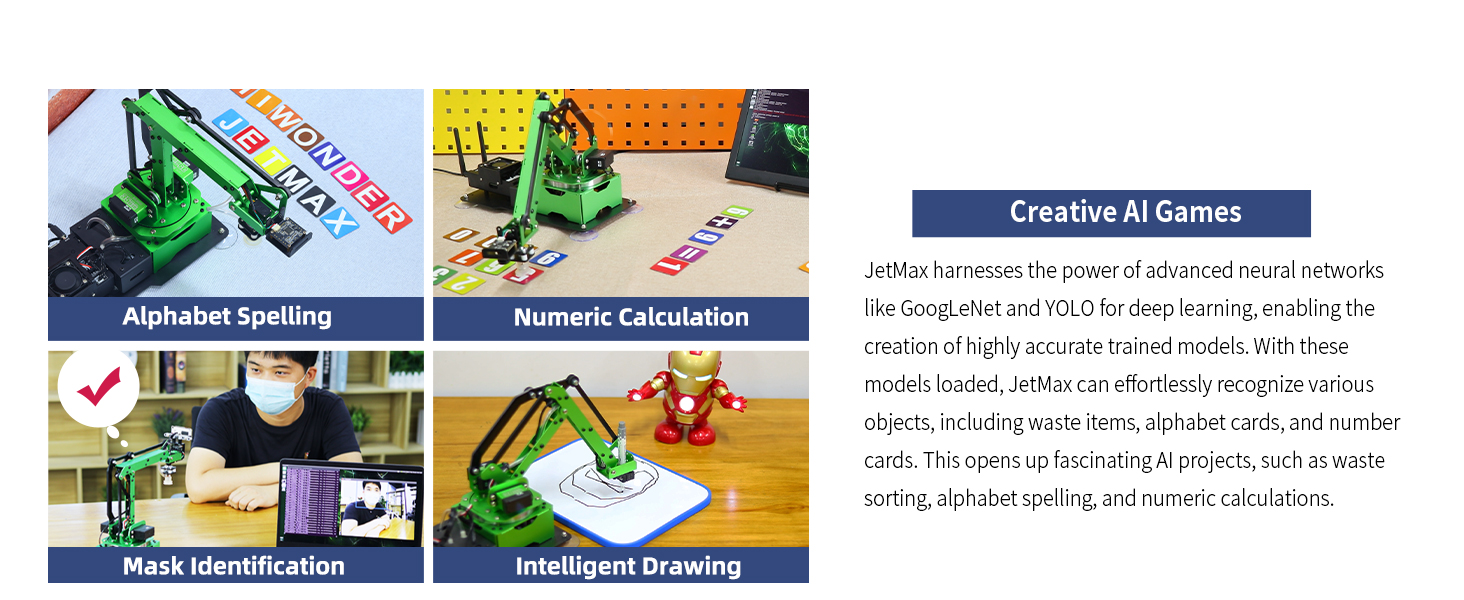
Python Programming
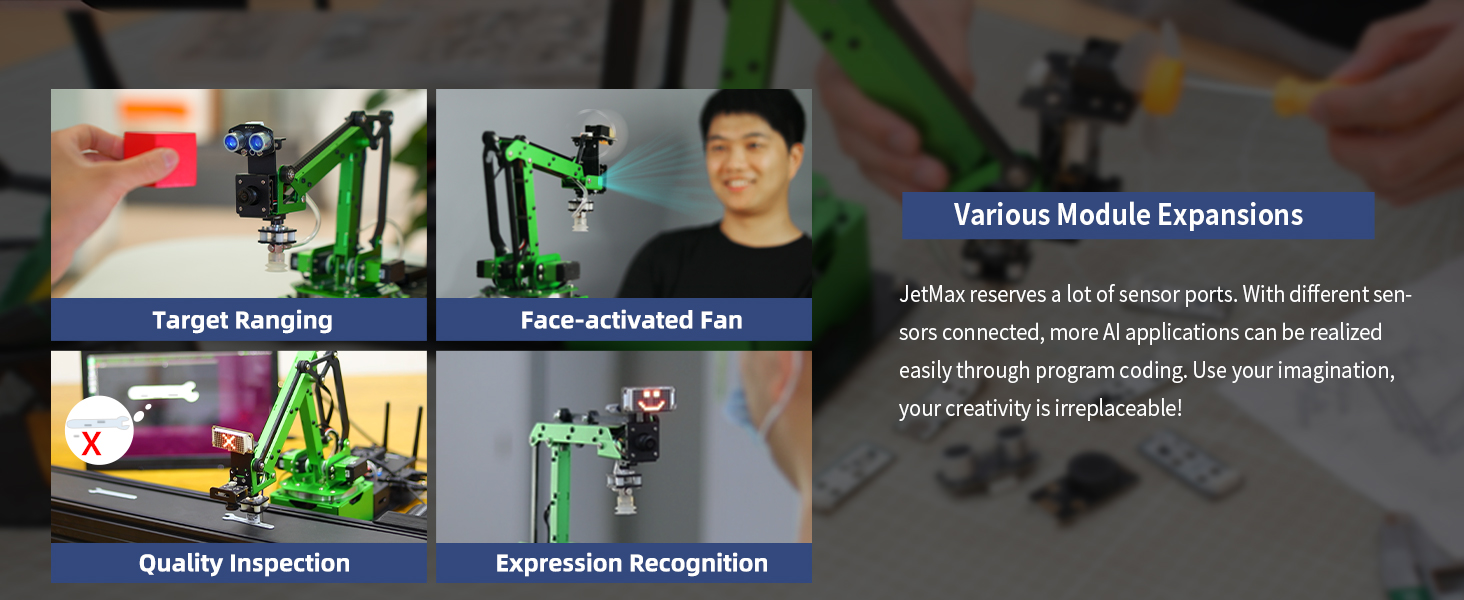
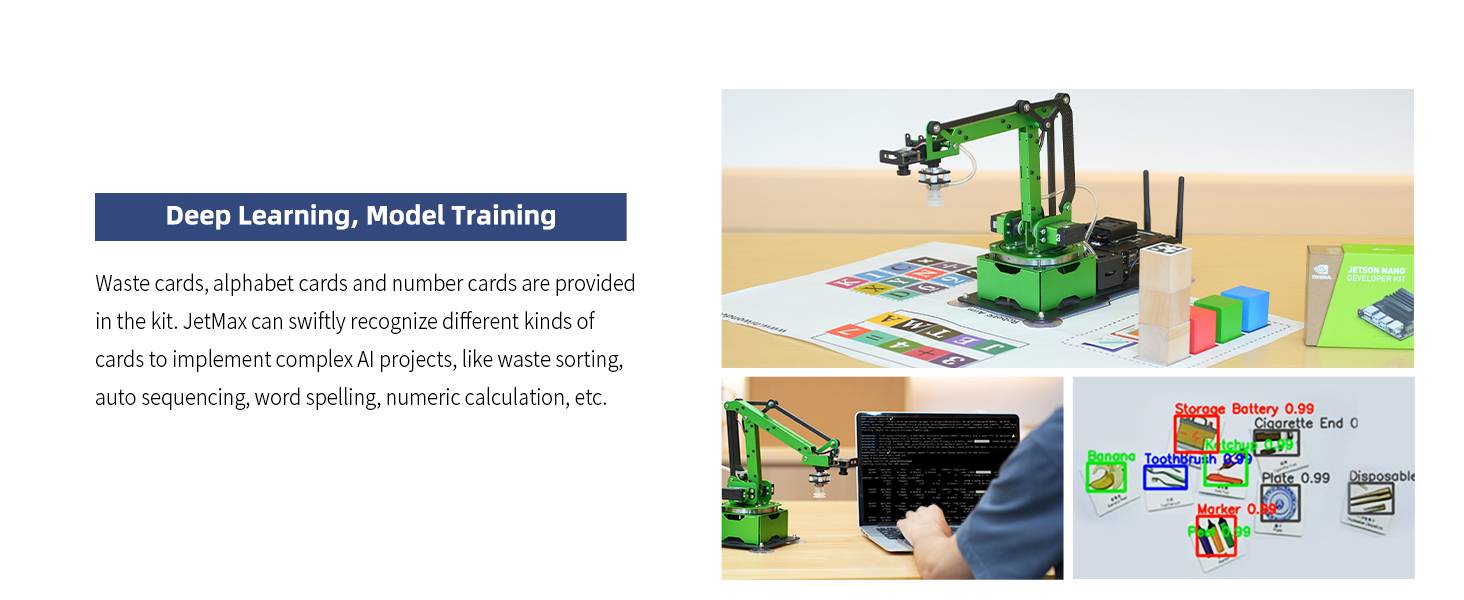
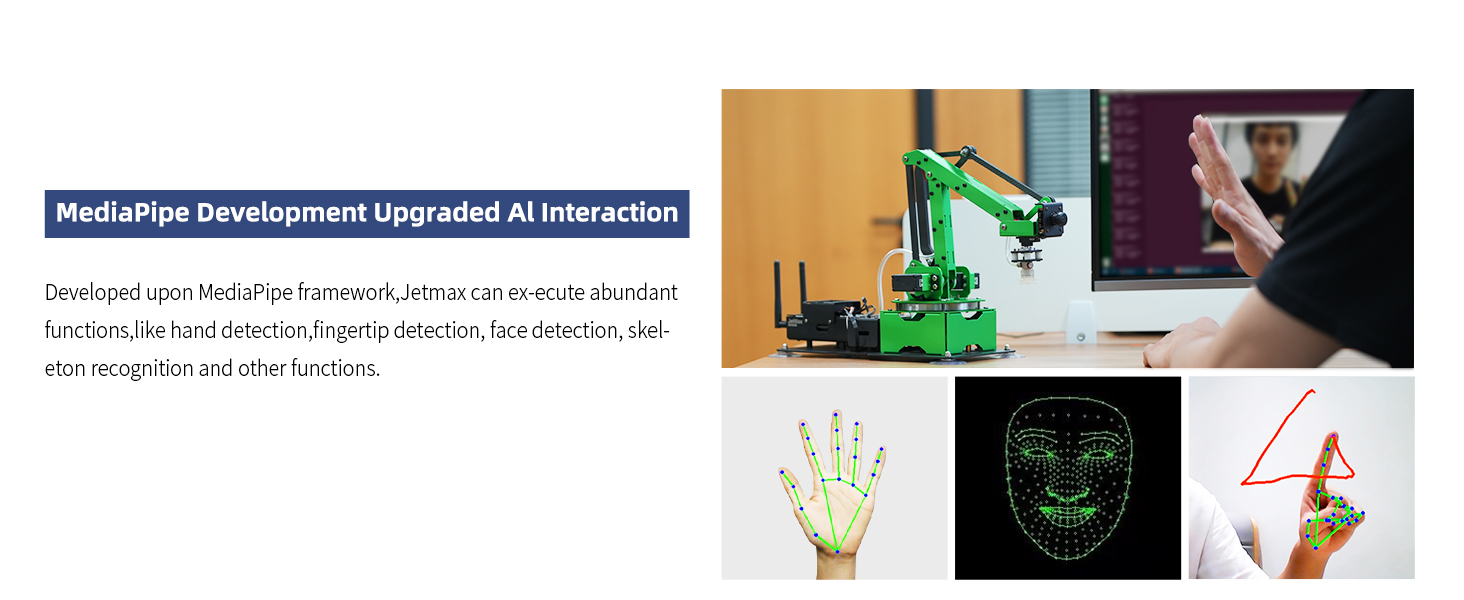
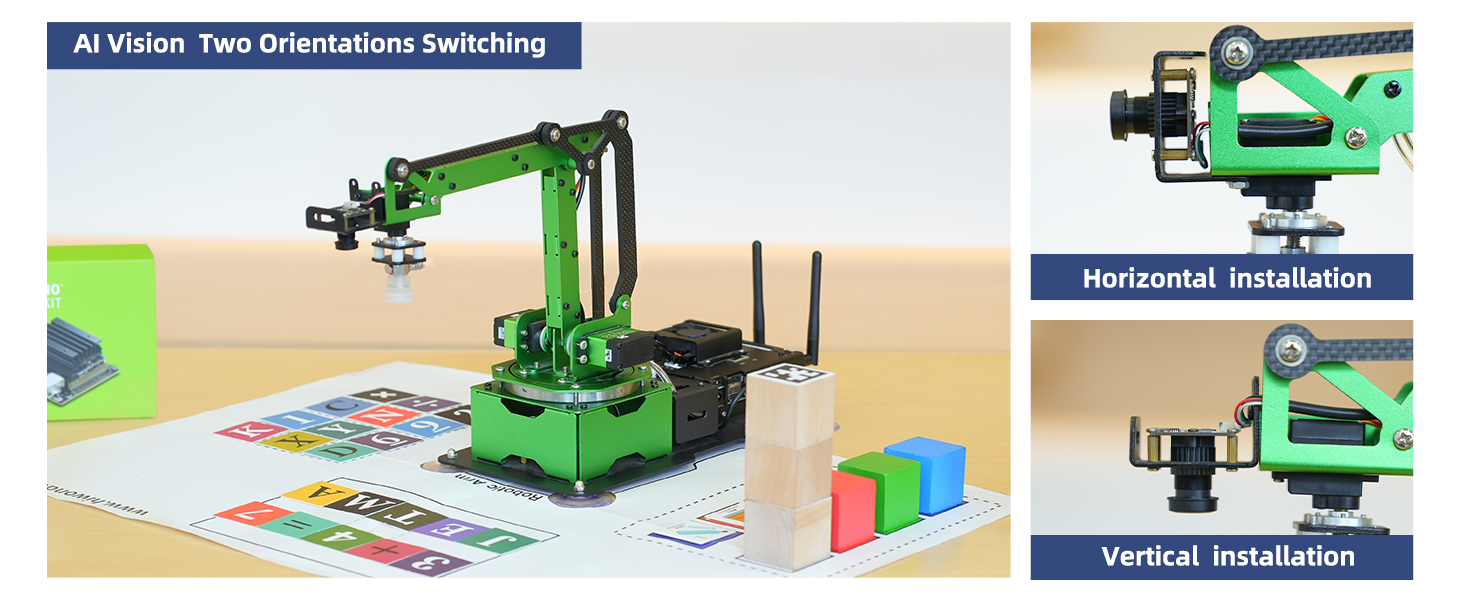
JetMax supports Python programming. Utilizing deep learning and AI vision, JetMax can handle tasks such as object sorting, face recognition, and more.

Creative Expansion
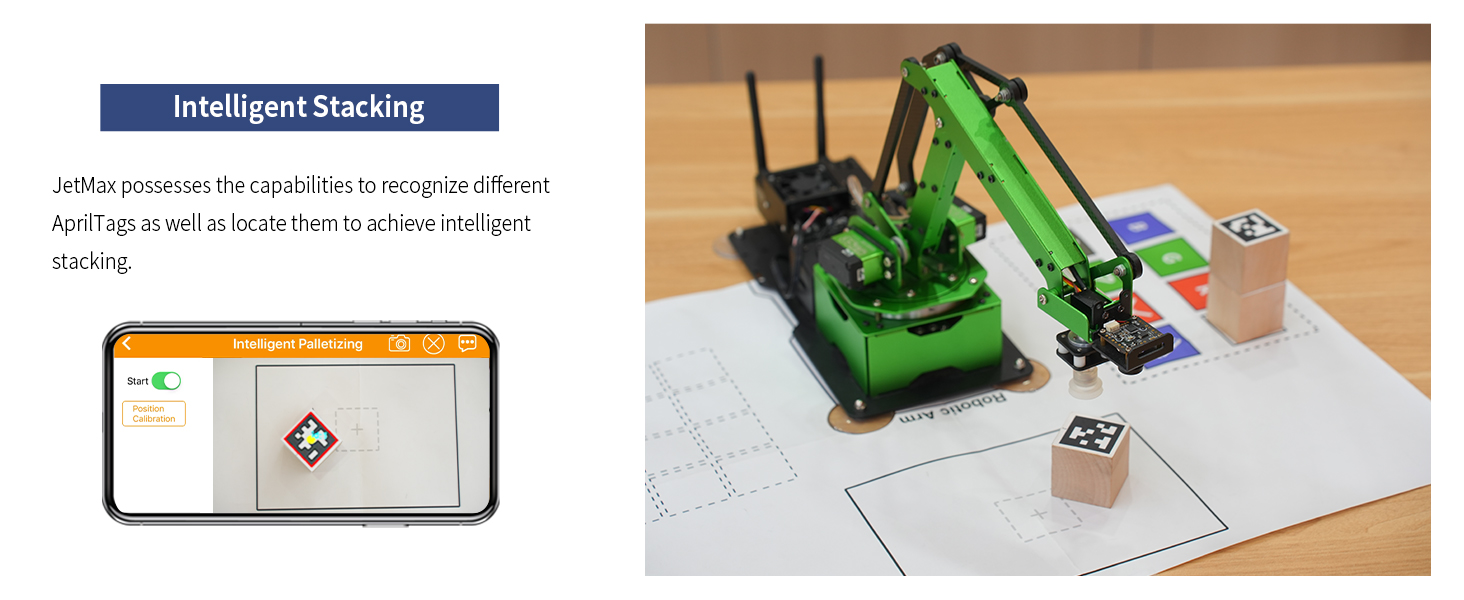
Working with a electrical sliding rail, JetMax excels in transporting, sorting, and stacking through precise motion distance calculations.
There have been no reviews for this product yet.
Related products












Contact Info
- Address: Unit 10, 26/F, South Tower, 1 Raffles Quay, Singapore 048583
- Phone: +65 3138 5888
- Email: info@tiktok.com